会走路的摩托?川崎重工推出氢动力四足机器人!2050年上市
在2025年大阪-关西世博会上,川崎重工发布的四足氢动力仿生摩托车CORLEO,以其突破性的设计理念和技术融合,重新定义了人类对交通工具的想象。这款被喻为“会走路的摩托”的载具,不仅是机械仿生学的杰作,更成为氢能应用与智能控制技术跨界创新的里程碑。

外观设计分析:
四足仿生架构
CORLEO的设计灵感源自狼、鹿和豹等敏捷动物,成为传统摩托车的全地形替代品。CORLEO彻底摒弃轮式设计,采用四条独立运动的机械腿,每条腿末端配备两组防滑橡胶蹄,可自适应草地、雪地、碎石等复杂地形。

图源:川崎重工
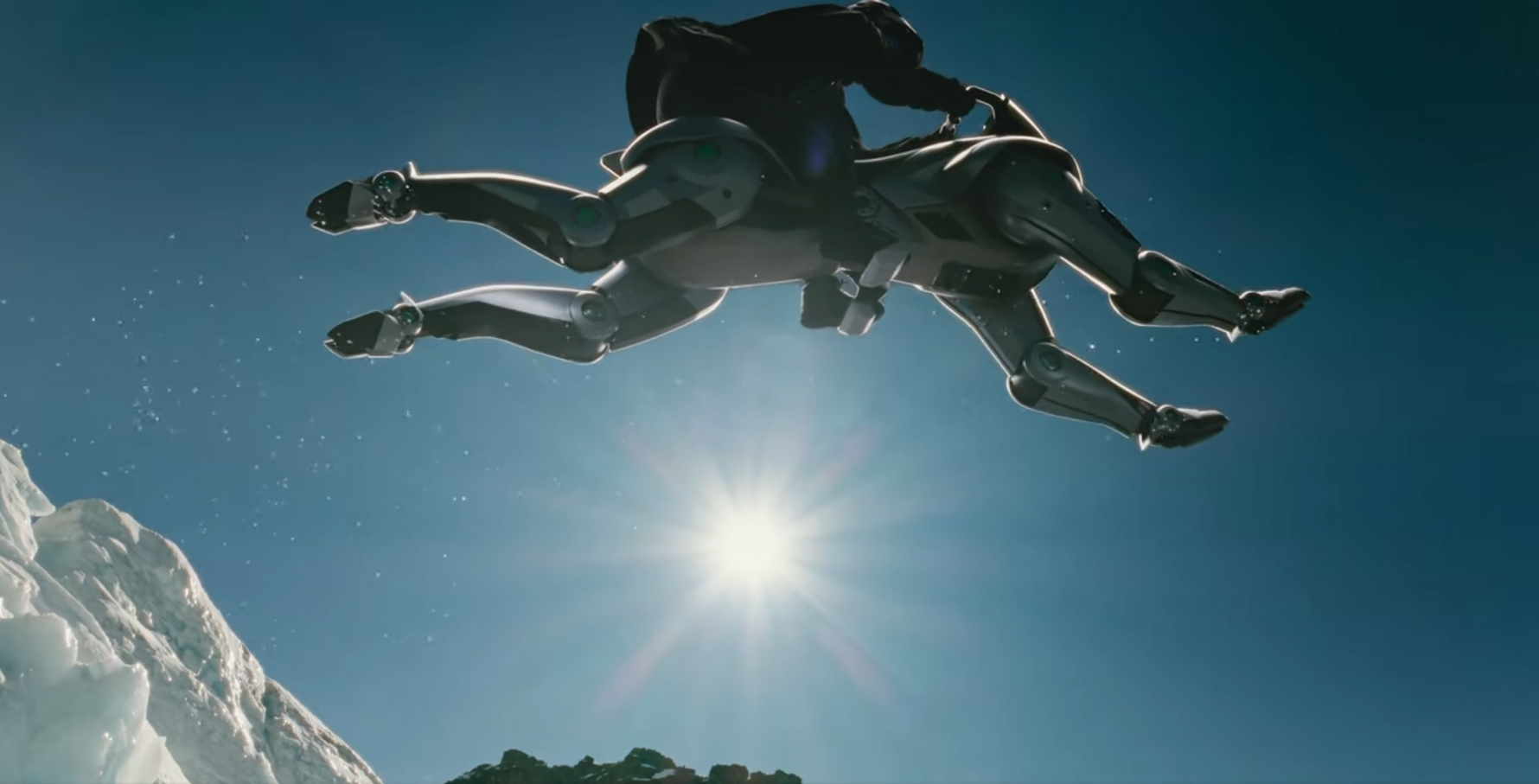
其核心仿生技术源于川崎在机器人算法与摩托车悬挂系统的数十年积累:后腿摇臂机构模仿动物关节缓冲机制,能在45度斜坡或阶梯地形中保持平稳,而地形适应算法更与中国航天科工的火星车技术存在共通性。为提升性能,机械腿关节采用航空级钛铝合金材料,在保证强度的同时实现40%轻量化突破。

图源:川崎重工
骑乘 CORLEO 的方式也别具一格。骑手如同骑马一样跨坐在机器人身上,但操控方式却完全颠覆传统。CORLEO 不依赖方向盘或手柄,而是通过感知骑手的身体动作来调整步伐。当骑手通过身体重心的偏移发出指令时,四条机械腿会实时响应,带来一种直观而流畅的驾驶体验。这种创新的交互方式不仅降低了学习门槛,还让骑手能更专注于周围的环境,而无需分心于复杂的机械操作。
图源:川崎重工
氢动力驱动更环保
CORLEO搭载 150cc 的氢燃料发动机。这台发动机通过氢燃料电池发电,为四条机械腿提供动力。氢气发电驱动四条机械腿,氢气罐藏在后座。与传统内燃机相比,氢动力系统最大的优势在于其环保性——它的排放物仅为水蒸气,几乎不产生碳排放。
川崎还在去年推出了同样采用氢燃料的 Ninja H2 HySE 摩托车。这款摩托车曾在日本著名的铃鹿赛道上亮相。而 CORLEO 的问世,则进一步将这一理念推向了全新高度,将清洁能源与机器人技术相结合,开辟了个人交通工具的新疆域。
川崎表示,CORLEO 的目标是在未来 25 年内实现商业化,预计到 2050 年左右,这款机器人可能会正式进入市场。虽然目前尚无具体的开发时间表或性能数据,但其亮相已足以证明川崎对未来移动性的信心——
一款既能满足探险需求,又能减少环境负担的交通工具,或许正是我们所期待的下一代出行方式。
人工智能(AI)与导航的未来
CORLEO 的另一大亮点在于其内置的人工智能(AI)系统。这些系统负责增强机器人的平衡性和导航能力,使其能够在复杂环境中自主应对挑战。每一只机械腿都能独立运作,实时调整姿态以适应地形变化。这种智能化的设计不仅提升了骑行的安全性,还让 CORLEO 在无人干预的情况下也能表现出色。
据报道,CORLEO 的设计灵感部分来源于电子游戏《地平线:零之曙光》(Horizon Zero Dawn)。这款游戏中的机械生物以其流畅的动作和适应性著称,而 CORLEO 似乎试图将这种虚拟世界的奇思妙想带入现实。AI 的加入让它不仅是一台交通工具,更像是一个有“生命”的伙伴,能够与骑手协同工作,共同探索未知领域。

图源:游戏《地平线:零之曙光》
随着自动驾驶和智能导航技术的不断进步,未来的交通工具将不仅是多形态的机械设备,而是能够理解环境、学习用户习惯的“智能体”。
技术方面的质疑
但也有人提出了质疑。目前四足机器人的负载模式是运货的,想要实现真正的载人,四足机器人至少得先实现“大型化”。
四足机器人要做得更大只甚至到达能载人的标准,机器人的结构、关节、电控、算法几乎都要重新设计。
比如四足机器人载人需要极高的关节扭矩和功率密度。
当前主流的电机驱动系统(如无刷电机)虽在轻量级机器人中表现优异,但面对人体重量(通常需承载60-100kg)就会出现电机输出力矩和散热能力不足的问题,而使用更高功率的电机又要面临能源消耗太大和尺寸太大的问题,目前还没有找到两全之策。

图源:波士顿动力
另外,载人四足机器人需在保证结构强度的前提下减轻自重。
小型的四足机器人四肢结构简单,看上去就像插着四条“棍子”。这种“细狗”尺寸的机械腿目前使用的主流材料(如航空铝、碳纤维)虽能降低重量,但关节和腿部结构的抗疲劳性仍无法长期承受人体重量冲击;如果做成CORLEO那样的大粗腿也许能解决载人后的重量冲击问题,但又会极大地增加机器人的自重。
算法的提升也是四足机器人大型化乃至实现载人的关键。
载人场景需机器人具备高度动态平衡能力,尤其在上下坡、跨越障碍时需实时调整步态;四足机器人每条腿通常有3-4个自由度,载人时需协调12-16个关节的运动、同时兼顾机身姿态和乘客舒适性,算法实现的难度非常高。

图源:波士顿动力
最后,大型化+载人意味着重量飙升,需要电池输出更大的功率,但又受限于四足机器人的体积、电池包的重量,现有的电池技术下还无法实现大功率和长续航的平衡。在大功率放电和持续高负荷工作时电池、电机还会产生大量热量,对大型四足机器人的电池、关键部件散热有很高要求。
目前工业四足机器人将自重控制到100kg级别已经是极限了。未来还要依赖材料学和电池技术的进步,才有可能继续让四足机器人变大。
本文内容来源于网络等公开信息,“新能源技术与装备”整理,责任编辑:胡静,审核人:李峥
版权声明∶转载新能源网站内容,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱∶process@vogel.com.cn,请添加小编微信号(msprocess)详细沟通。
相关推荐
-

-

世界最大输量绿氢管道开工!康保至曹妃甸氢气管道究竟有多牛?
2025年3月,康保-曹妃甸氢气长输管道项目已完成省发改委备案,项目前期评价手续已基本完成,张北段线路部分已启动勘测工作。
2025-04-02
-

万钢报告:电堆功率密度激增67%,氢车突破2.8万辆!【附演讲PPT】
3月29日,中国科学技术协会主席万钢在2025中国电动汽车百人会论坛上表示,全面市场化的需求推动了插电、增程、混合动力的技术创新,实现了混动系统综合效率的不断提升,也为氢基燃料电池发动机研发和应用打下了基础。
2025-04-02



热点文章
-

2026 SNEC光储展:储能首次成为核心展示板块,多家企业发布新品与达成合作
2026-06-05
-

-

-

华电福建5兆瓦级海水制氢项目环评批复;氢枫、国富氢能预中标总投资7000万元加氢站项目
2026-06-01
-

中车成功交付“液态阳光”项目核心制氢装备;东风氢燃料电池通过新国标10000小时耐久验证
2026-05-25
-

-

招中标 | 国家电投绿氢合成氨项目招标;大唐甘肃风光耦合离网制氢项目开标
2026-05-29
-

氨为氢能产业带来发展新机遇
氢能作为一种备受追捧的零污染高效能源,其稀缺性使得人们对其渴求不已。然而,能耗巨大的压缩过程以及极低温度下的液化环节,被视为通往氢能转型之路上的重大障碍。在此背景下,氨成为热门的替代选项,尽管这种物质带有些许气味,但它有望成为能源转型中的奇迹材料。
作者:
-
氨为氢能产业带来发展新机遇
-
氨为氢能产业带来发展新机遇
-
氨为氢能产业带来发展新机遇
-
艾默生自动化技术助力绿氢安全高效生产
-
艾默生自动化技术助力绿氢安全高效生产


评论
加载更多