基于小波分层解耦的氢燃料电池复合电源拖拉机能量管理策略
摘要:针对单一能量系统无法充分发挥其优势,无法较好满足拖拉机作业时随机载荷谱密度大的问题,设计了基于氢燃料电池、动力电池、超级电容并联的电动拖拉机复合式能量系统。基于 Haar 小波与逻辑门限规则的分层解耦控制能量管理策略,实现了负载需求功率的高频信号、次高频信号、稳态信号的分层解耦,并对解耦后的功率信号进行功率分配。进行了模型在环仿真测试,结果表明: 与功率跟随式控制策略及模糊控制策略相比,所建立的分层解耦控制策略氢燃料电池平均效率在试验循环内分别提高了 2.85% 、1.21% ,整车等效氢气消耗量分别降低了 16.11% 、6.88% 。本控制策略可以在满足整车负载需求功率的基础上提高整车经济性,并使燃料电池以高效平稳的工作状态输出功率。
关键词: 电动拖拉机; 复合电源; 能量管理; 燃料电池; 分层解耦
随着电源技术和电动机技术的迅速发展,电动拖拉机为实现绿色农机技术提供了新途径。文献指出,拖拉机作业时易产生阻力波动,相较道路车辆,拖拉机田间作业随机载荷特性复杂,载荷波动大。燃料电池具有效率高、比能量大、加装便捷的特点,但其具有反应迟滞性的缺点;蓄电池具有功率密度高、成本低等优点,但存在能量密度低、遇突变载荷易过充放电而缩短寿命的问题; 超级电容具有动态响应快、冷启动性能好等优点,但其存在比能量低、放电时间短等缺点,只能作为辅助能源进行供电。如何协调氢燃料电池、蓄电池、超级电容之间的能量分配,制定合理的能量管理策略是此类拖拉机研究的关键。
针对燃料电池混合动力系统车辆能量管理问题,以某国产轿车为原型,对“燃料电池/蓄 电池/超级电容”的混动系统进行了整车仿真,验证了其复合式结构可行性及超级电容的“削峰”作用。提出了一种基于微小变量模糊逻辑控制的燃料电池补偿动力电池放电的能量管理控制策略模型,其与传统的功率跟随型控制策略相比,氢燃 料消耗量降低,整车总效率提高。文献对混合动力汽车提出了一种实时 BP 神经网络的能量管理策略,其可以根据动态规划所给出的最优控制,实现全局最优解。文献针对混合动力汽车,利用随机森林方法进行多目标优化,提高了超级电容的利用率和系统效率。 此外,文献针对含氢燃料电池的复合式电源能量管理策略进行了研究,验证了复合电源的优点,提高了车辆续驶里程。考虑拖拉机多为田间作业,负载波动大、载荷谱特性差异大,文献设计了燃料电池 /蓄电池混合动力电动拖拉机动力系统的结构和功率流,并制定了一种基于模糊控制的能量管理策略,其与开关控制策略相比,等效氢气消耗量降低,但其复合能量结构未包含超级电容且其能量管理策略未对蓄电池的功率波动进行研究控制。研究了基于随机载荷功率谱的电动拖拉机复合能量系统,其能量管理策略能够将动力电池电功率抑制在载荷波动基频附近,但其复合能量结构未包含燃料电池。
文中以复合电源结构混动拖拉机为研究对象, 论证了单一能量系统无法较好满足拖拉机工况,选用磷酸铁锂电池和氢燃料电池、超级电容并联的复合式电源结构,设计了基于小波与逻辑门限规则分层解耦的氢燃料电池复合电源拖拉机能量管理策略,以期在满足整车负载需求功率的基础上提高整车经济性,并使燃料电池以高效平稳的工作状态输出功率。
1. 1 氢燃料电池系统
采用质子交换膜燃料电池 ( proton exchange membrane fuel cell,PEMFC) 作为所选用的氢燃料电池类型,图1 为 PEMFC 理想电压和实际电压变化曲线。
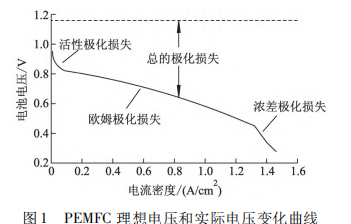
开路电压计算如下
式中: EOC为开路电压,V; KC 为电压常数; En 为能特斯电压,V; F 为法拉第常数; PH、PO 分别为氢气、氧气进入反应堆的分压,Pa; R 为燃料电池内阻,Ω; T 为反应温度,K.由图 1 可知,PEMFC 反应过程存在电压损失,分别如下

式中: Va 为活性极化损失,V; ξ 为经验系数; I 为燃料电池电流,A; CO 为氧气质量浓度,kg /m3
V0 = IR ( 5)



式中: V0 为欧姆极化损失,V; A 为塔菲尔斜率; i 为 交换电流,A; L 为质子交换膜的厚度,mm。

式中: VC 为浓差极化损失,V; B 为损失因子。综上,氢燃料电池输出电压 EFC、功率 PFC、效率 ηFC如下:



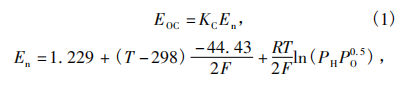
文中所选用燃料电池系统输出电压 300 V,额定功率 12 kW,峰值功率 20 kW。该系统整体效率和功率关系如图 2 所示。
1. 2 蓄电池输出特性
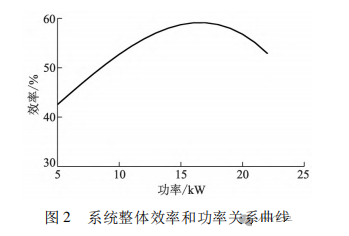
为研究磷酸锂铁电池的输出特性,于河南省汽车节能与新能源重点实验室内采用磷酸锂铁电池组、上位机、放电电阻等试验设备进行蓄电池输出特性试验。采用0.5 C、2. 0 C、3. 0 C 和5.0 C 放电倍率对试验用磷酸锂铁电池组进行输出特性研究。其放电特性试验如图 3 所示,每组试验放电前需将磷酸锂铁电池组的电量充满,使其荷电状态( state of charge,SOC) 接近 1.
图3 磷酸锂铁电池放电特性试验
选用西安迅湃技术有限公司生产的直流电池模拟器,同时设置与其放电倍率匹配的放电电阻,利用电池测试系统进行模拟放电静态测试,直至电池组的电量放完,SOC 接近 0. 通过上位机获取整个放电过程中磷酸锂铁电池组的放电特性如图 4 和 5 所示。

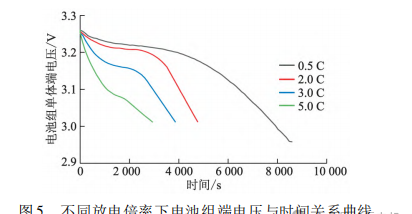
由图 4 和 5 可知: 不同的放电倍率会对磷酸锂铁电池的放电特性产生影响,放电倍率越高,电池单体端电压下降速度越快且同等 SOC 状态下的电池单体端电压越低; 输出电流波动对蓄电池的使用有着重要影响。因此,使用磷酸铁锂电池为拖拉机供能时,会面临载荷波动较大、放电倍率较高而导致的电池端电压和输出容量下降等问题。
1. 3 复合电源结构分析
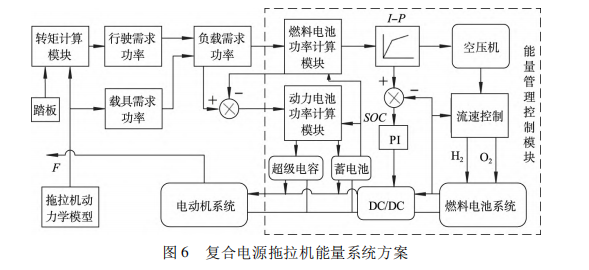
氢燃料电池具有特定功率区域高效、比能量大、加装便捷的特点,但其具有反应迟滞性的缺点。动力电池面对功率波动时具有高敏性,由于其特有的双层电容效应导致高频电流不能进行电荷转移反应,无法满足电动拖拉机作业时的高频功率需求,难以实现功率突变时的功率补偿。超级电容器的比功率可达蓄电池的 10 ~ 100 倍,能够达到 3 kW/kg,具有良好的暂态性能,能够对动力电池高频放电过程进行功率补偿,平衡部分峰值功率和暂态功率,减少高频电流对电源系统效率和寿命的影响。综上,电动拖拉机的能量系统方案如图 6 所示, 能源部分包括氢燃料电池、动力电池、超级电容模块。三者通过 DC /DC 转换器组成复合电源,并通过能量管理控制模块实现负载需求功率的分配。
复合电源结构优势的发挥离不开先进的能量管理策略,针对文中能量系统兼具高能量比和高功率的特点,提出了一种多层解耦控制的实时能量管理控制策略。
2. 1 能量管理策略设计原则
文中所设计的能量管理策略的总体目标是尽可能地提高拖拉机整机经济性。通过将电动拖拉机作业时的高频功率信号过滤,将剩余功率信号中的高阶功率再次过滤,从而实现功率信号的分层解耦。将解耦后的功率分配给不同的电源,从而实现负载需求功率的耦合。
结合各电源的特性,制定设计原则如下: ① 保持最优的燃料电池性能。通过对燃料电池输出效率分析可知,PEMFC 系统的峰值效率约为 60% ,峰值效率时的输出功率为 11 kW,选取其效率峰值的 90% 区域为高效区[4,15]kW. 为保持较高的经济性能,能量管理策略需要控制燃料电池尽可能长时间地在高效区内运转; ② 保持蓄电池组及超级电容合理充放电。由图 4 可知,在蓄电池充电末期( SOC≥ 0.8) 及放电末期( SOC≤0. 2) 时,单体电池端电压会出现陡增陡降的现象,极易引起其过充过放,影响其使用寿命; 结合图 5 可知,不同的放电倍率( 即输出电流大小) 对单体电池的端电压也有较大影响,从而影响其使用时间及电池寿命。因此,在设计能量管理策略时,应利用 PEMFC 系统及超级电容, 使蓄电池 SOC 维持在[0. 2,0. 8],以避免电池的过充过放。
2. 2 基于 Haar 小波的一层功率解耦
2. 2. 1 小波选择
小波变换可以在非周期性和非稳定性的时域和频域里提取信号信息,能够有效将离散功率需求信号中的高频功率信号和低频功率信号分离。小波变换的滤波效果主要由其函数决定。相比于其他小波函数,Haar 小波变换具有滤波跨度短、形式简单、其小波正逆变换相同的特点。选用 Haar 小波变换可以有效降低能量管理系统的运算复杂度,从而提高代码执行率。因此,文中利用基于 Haar 小波的二通道滤波器组,通过滤波器将原始信号分解为基准信号和细节信号,从而实现能量管理系统对负载需求功率信号的动态快速解耦。
2. 2. 2 基于 Haar 小波的二通道正交滤波器组设计
拖拉机工作时的负荷率较高,载荷谱具有典型性,根据 28.5 kW 拖拉机波动载荷谱密度设定滤波过程的控制频率为作业模式波动载荷的基频加上1 Hz。 电动拖拉机负载分配算法中的控制频率为 4 Hz。利用 Haar 小波函数导出滤波器数学模型,尺度函数为

导出 Haar 小波函数为
Haar 尺度函数和小波函数正交,以尺度函数φ( n) 为父函数,小波函数 φ( n) 为母函数,构造正交空间 Wj 和 Vj 。母线负载需求功率离散信号函数 Pbj ( n) ∈Vj - 1,证明了 Wj - 1 是 Vj - 1 对于 Vj 的正交补空间。因此,通过定义补偿函数 wj - 1 ( n) ∈Wj - 1,可得
令 Pbj ( n) = Pb0 ( n) + wj' ( n) ,则波动载荷信号分解为基本信号和细节信号,细节信号为

式中: al、bl 和 l 为离散化后的尺度因子和平移因子; j 为信号分解层数。根据控制频率的设定情况,对负载需求功率 Pb 进行分解。将拖拉机负载需求功率分解重构至第 4 层,保留 j'≤4 部分的细节信号。图 7 为基于 Haar 小波二通道正交滤波器组的拖拉机负载需求功率分配算法框图。首先通过阶梯函数对 Pb 进行相似离散化处理,将得到离散信号 Pbj ( n) 经高、低通滤波器 H0 ( z) 和 H1 ( z) 分解为基本信号和细节信号,然后对信号进行下取样,通过调整小波变换系数对信号进行滤波,最后通过滤波器 Gn ( z) 进行信号重构,输出稳态低频功率 Pa ( n) 以及高频功率,完成对负载需求功率的解耦。
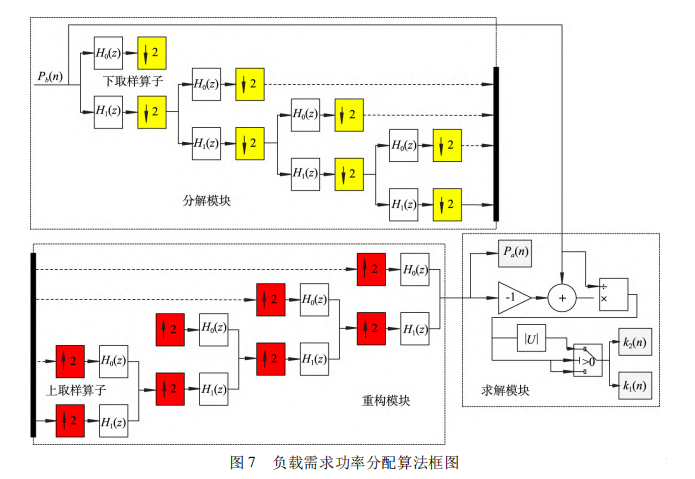
其中,解耦后的高频功率特性近似于均值为 0 的白噪声,可将该部分功率分配至超级电容,利用超级电容高功率比的特点,有效抑制高频功率信号,保护氢燃料电池及动力电池,提高母线电压品质。根据式( 13) - ( 16) ,设计滤波器组为
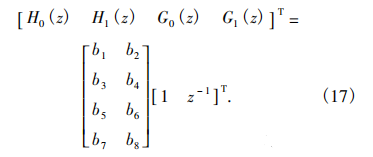
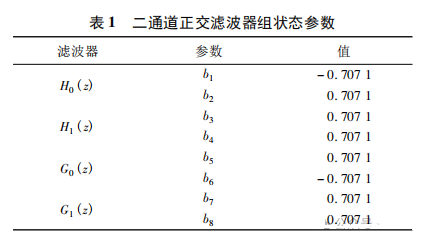
根据前期研究,设定滤波器组的状态参数如 表 1 所示
2. 3 基于逻辑门限规则的二层功率解耦
经过 Haar 小波变换过滤后的信号虽剔除了原有信号的高频部分,但低频功率 Pa ( n) 中仍存在次高频功率信号。由于氢燃料电池的反应迟滞性以及为保持氢燃料电池的高效性,基于逻辑门限规则对低频功率 Pa ( n) 进行二层滤波解耦。
采用基于确定规则的逻辑门限阈值控制的能量分配模型对 Pa ( n) 进行解耦。结合拖拉机作业特点将 Pa ( n) 划分不同的供给模式: 氢燃料电池供电模式( M1 ) 、功率补偿模式( M2 ) 、峰值放电模式( M3) 。其中,氢燃料电池供电模式下,氢燃料电池独自承担低频功率 Pa ( n) ; 氢燃料电池功率补偿模式下,动力电池对超出氢燃料电池最优功率区域的波动功率进行补偿; 峰值放电模式下,氢燃料电池输出逻辑规则内的峰值功率,动力电池对过盈功率进行补偿。考虑氢燃料电池的反应迟滞性,定义功率波动比为 λtur,通过逻辑门限规则对氢燃料电池的输出功率加以限制:

设置门限值控制参数如下: 当前氢燃料电池功率 PQ; 低频功率 Pa ( n) ; 氢燃料电池最优功率上限阈值 PQlim ; 氢燃料电池功率波动比 λQ; 氢燃料电池功率波动比阈值 λlim ; 动力电池功率波动比 λD; 动力电池功率波动比阈值 λDlim 。判断条件设置: “PQlim > Pa”为 N1; “PQlim ≤Pa”为 N2; “λQ ≤λQlim”为 N3; “λQ > λQlim”为 N4; “λD≤λDlim”为 N5; “λD > λDlim” 为 N6。 则电动拖拉机能量管理逻辑规则为

式中: S 为判断规则. 其逻辑门限规则如图 8 所示。
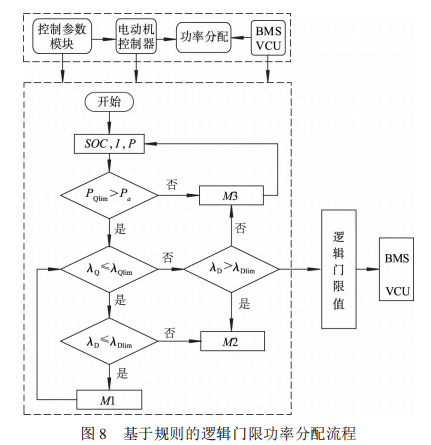
由图 8 可以看出,利用逻辑门限规则,将低频功率中的次高频功率分配给动力电池,而将稳态功率分配给氢燃料电池,当遇功率突增情况时,如果需求功率及其波动比在允许的阈值内时,由氢燃料电池进行全部功率的输出; 当需求功率或其波动比超出允许的阈值内时,蓄电池只进行规则波动比阈值内的功率输出,超出阈值的部分由动力电池提供,从而实现经 Haar 小波解耦后的低频功率的二层解耦。
2. 4 多层能量管理策略设计
综上,采用前置 Haar 小波变换一层功率解耦和后置逻辑门限规则二层功率解耦控制相结合的方式,建立多层能量管理控制策略,其逻辑结构如图 9 所示。
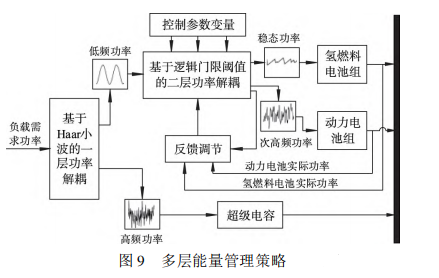
考虑拖拉机作业时随机载荷功率谱密度大的特点,综合能量系统各部件特点,首先,基于提升使用寿命性和安全性等因素考虑,在第一层将拖拉机复杂的负载功率信号解耦为高频和低频两种功率信号,其中高频功率直接由高功率比的超级电容独立承担; 其次,基于提升氢燃料电池效率及安全性等因素考虑,在第二层将低频功率解耦为次高频功率和稳态功率,其中稳态功率由氢燃料电池进行提供,而次高频功率由动力承担,并通过实时优化不 断调整第二层功率解耦状态。
基于课题组前期开发设计的混合动力拖拉机组仿真平台,在 MATLAB /Simulink 环境下搭建能量管理策略模型,在 AVL/Cruise 环境下建立电动 拖拉机整车仿真模型。通过 Cruise 软件中的 MATLAB DLL 组件进行联合仿真,建立了28.5 kW 电动拖拉机能量管理控制算法模型在环仿真平台,并进行测试。
为对比不同能量管理控制策略的效果,选择功率跟随式控制策略、模糊控制策略以及文中所建立的基于小波规则的分层解耦控制策略分别进行仿真试验并对比。
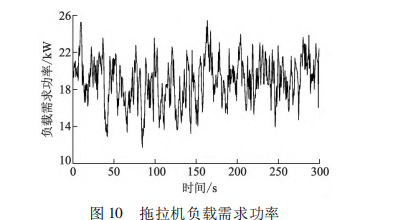
采用【徐立友,赵一荣,赵学平,等。 电动拖拉机综合台架试验系统设计与试验[J]. 农 业 机 械 学 报,2020,51 ( 1) : 355 - 363】文献中随机载荷模块的建立方法,得到符合拖拉机载荷波动功率谱的负载需求功率信号模块,如图 10 所示
3. 1 功率跟随式控制策略
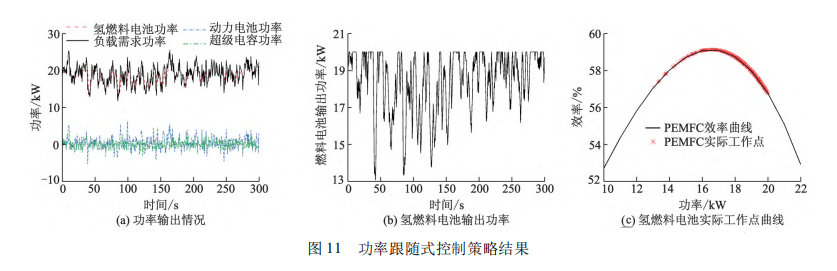
采用【徐立友,赵一荣,赵学平,等. 电动拖拉机综合台架试验系统设计与试验[J]. 农 业 机 械 学 报,2020,51 ( 1) : 355 - 363】文献中介绍的功率跟随方法,根据氢燃料电池的化学特性,优化设计基于功率跟随式的能量管理策略,通过控制模在环测试。设置氢燃料电池的最高输出功率为 20 kW,其部分结果如图 11 所示。由图 11 可以看出,氢燃料电池承担了主要的负载功率。由图 11b 可知: 功率跟随式控制策略氢燃料电池功率波动大、跨度大。由于功率跟随式控制策略仅考虑负载功率的变化情况,不具备对 PEMFC 系统工作点的优化功能,因此在工作过程中 PEMFC 的工作点较为分散,且大部分工作点偏离其工作高效区间,如图 11c 所示。
3. 2 模糊控制式控制策略
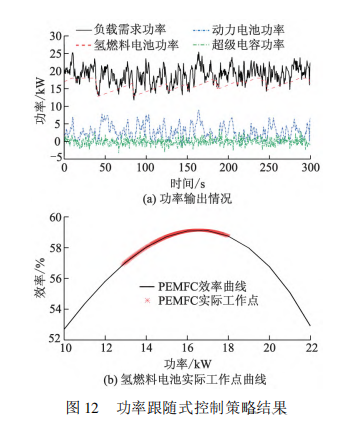
采用【李妍颖,刘孟楠,徐立友,等. 基于非线性规划遗传算 法的混合动力拖拉机控制策略[J]. 江苏大学学报 ( 自然科学版) ,2023,44( 2) : 166 - 172,185.】文献中的流程,优化设计了以负载需求功率、氢燃料电池输出功率、氢燃料电池功率波动比作为模糊控制器的输入变量,各能源输出情况作为输出量的模糊控制器,部分结果如图 12 所示。
由图 12a 可知: 氢燃料电池承担了主要的负载功率,模糊控制策略下氢燃料电池功率波动小、跨度大,基于模糊控制规则的氢燃料电池最高输出功率为 18 kW。
由于模糊控制式控制策略仅考虑负载功率的变化情况,并对波动进行模糊抑制,未考虑对 PEMFC 系统工作点的优化,因此在工作过程中 PEMFC 的工作点较为分散,部分工作点偏离其工作高效区间,如图 12b 所示。
3. 3 基于小波规则的分层解耦式控制策略
采用文中提出的基于小波规则分层解耦式控制策略对拖拉机负载需求功率进行模型在环仿真试验。
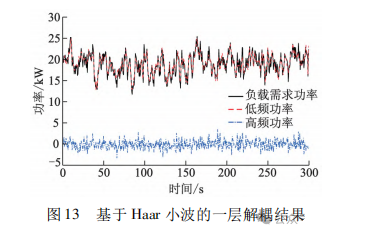
首先,将负载需求功率输入至文中设计的基于 Haar 小波的二通道正交滤波器组,对高低频功率进行一层解耦,解耦情况如图 13 所示。由图可知: 经过 Haar 小波变换一层滤波后负载需求功率中的高低频信号被有效解耦,其中高频功率均值为 0. 003 kW,方差为 0. 054 kW2 ,近似符合标准正态分布。基于 Haar 小波的双通道滤波器同时具有一定的时间分辨率和频率分辨率,满足控制需要。
其次,将解耦后的低频功率信号部分进行基于逻辑门限规则的二层功率解耦,解耦情况如图 14 所示。由图可知: 经过逻辑门限规则的二层解耦后低频功率中的次高频信号和稳态信号被有效解耦,其中次高频功率均值为 2.44 kW,稳态功率均值为 16.57 kW,稳态功率信号变化与次高频信号相比明显更加平稳。

根据文中所设计的多层能量管理策略,将解耦后的功率信号进行分配,部分结果如图 15 所示。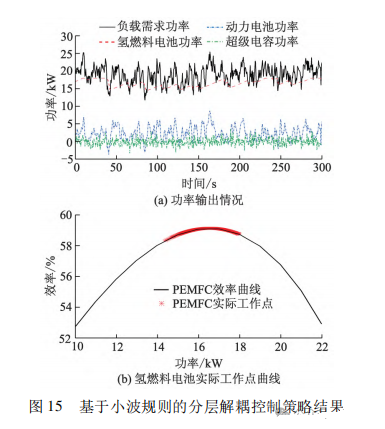
由图 15 可知: 采用多层能量管理策略后,负载需求功率被合理地分配至各动力源,氢燃料电池、动力电池、超级电容的输出功率呈现出稳定、次高频、高频的特征。基于小波规则的分层解耦式控制策略氢燃料电池功率波动小、跨度小。由于其具备 对 PEMFC 系统工作点的优化功能,因此在工作过程中 PEMFC 的工作点较为集中,且大部分工作点集中在高效工作区间。
3. 4 能量管理策略对比分析
显然,上述 3 种控制策略均可满足需求功率的供给,在此前提下,为比较不同能量管理策略的控制效果,选取氢燃料电池输出功率波动情况、氢燃料电池工作效率、工作氢气消耗量作为评价指标。
由图 11、12、15 对比可知,基于小波的分层解耦式控制策略下的氢燃料电池输出功率变化最为平稳,可以有效提高氢燃料电池的使用寿命且更易控制。
不同控制策略氢燃料电池实际工作点对比结果如图 16 所示,由图可知: 与功率跟随式及模糊控制式策略相比,基于小波的分层解耦式控制策略下的氢燃料电池工作点更加密集,且靠近效率曲线最佳功率点。

表 2 为不同控制策略氢燃料电池平均功率点及效率的对比。由表 2 可知: 与功率跟随式及模糊控制式策略相比,基于小波的分层解耦式控制策略下的氢燃料电池平均效率最高,在试验循环内分别提高 了 2. 85% 、1.21%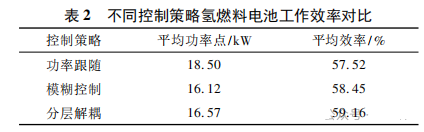
图 17 为各控制策略下氢气消耗量随时间的变化关系曲线。由图可知: 在仿真试验中,采用基于小波规则的分层解耦控制策略的整车等效氢气消耗量最低,即同样的行驶工况下,其能量消耗最低。图 17a 中分层解耦策略下 PEMFC 氢气消耗量低于功率跟随式控制策略但高于模糊控制式能量管理策略,这是由于后两者未考虑对氢燃料电池工作点的优化,动力电池与超级电容承担了过少或过多的负载需求功率,因此 PEMFC 耗氢量增高或降低。
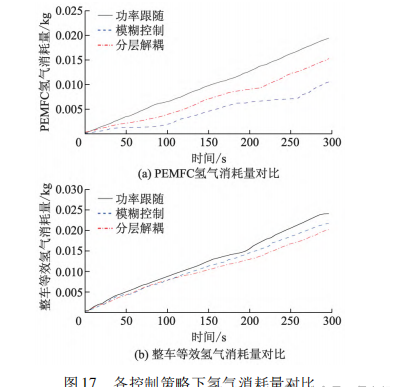
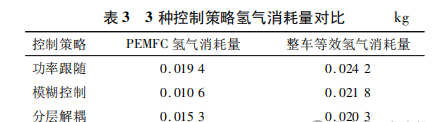
表 3 为循环结束后3种控制策略下的 PEMFC 与整车等效氢气消耗量对比,由表可知: 与功率跟随式及模糊控制式控制策略相比,基于小波规则的分层解耦控制策略的整车等效氢气消耗量分别降低了16.11% 、6.88% 。
1) 分析各能源的特性,论证了单一能量系统无 法充分发挥其优势,无法较好地满足拖拉机作业时随机载荷谱密度大的特性,设计了基于氢燃料电池、动力电池、超级电容并联的电动拖拉机复合式能量系统。
2) 针对复合式能量系统设计了基于 Haar 小波与逻辑门限规则的分层解耦控制能量管理策略,实现了负载需求功率的高频信号、次高频信号、稳态信号的分层解耦,并对解耦后的功率信号进行功率分配。
3) 进行了模型在环仿真测试,结果表明: 与功率跟随式控制策略及模糊控制策略相比,文中所建立的分层解耦控制策略氢燃料电池平均效率在试验循环内分别提高了 2.85% 和 1. 21% ,整车等效氢气消耗量分别降低了 16.11% 和 6.88% 。
4) 文中控制策略可以在满足整车负载需求功率的基础上提高整车经济性,并使燃料电池以高效平稳的工作状态输出功率。
本文内容来源于:河南科技大学 车辆与交通工程学院;河南科技大学 拖拉机动力系统国家重点实验室,责任编辑:胡静,审核人:李峥
版权声明∶转载新能源网站内容,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱∶process@vogel.com.cn,请添加小编微信号(msprocess)详细沟通。
相关推荐
-

氢能技术在储能发电领域的应用场景解析
氢能技术是一种以氢气作为能源载体的能源生产和利用方式,依靠氢巨大的能量密度,通过氢气燃烧获得能量。由于氢气在燃烧时只产生水,不产生温室气体和空气污染物,因此被认为是一种清洁、可再生的能源。
2024-04-04
-

新型物理储能技术路线、优势和不足分析
本文主要分析三种新型物理储能方式的原理及技术路线等,并总结了每种储能方式的优势和不足,在新能源发电及电网调峰调频等领域中,为新型物理储能技术路线的选择提供参考。
2024-04-03
-

2024年六大新型储能技术:压缩空气储能、钠电池储能、飞轮储能等
2024年,国内新型储能产业持续多元化技术路线发展策略,各类储能技术在追求安全性提升的同时,正朝着成本更低、性能更优、环保性更高的综合发展目标稳步推进,六大新型储能技术未来可期。
2024-04-03



热点文章
-

-

-

榆林零碳产业园氢能(制氢)示范项目最新进展;吉林19.72万吨绿色甲醇项目开工
2026-06-29
-

招标 | 南方电网分布式绿电制氢项目招标;中能建风光氢制绿色醇油项目EPC中标
2026-07-06
-

京津冀首个民用液氢项目试运行;陕西省氢能综合利用一体化测试项目调试成功
2026-06-25
-

-

辽宁10万吨绿色甲醇项目EPC总承包中标候选人公示;中能建风光氢制绿色醇油项目EPC中标
2026-07-07
-

氨为氢能产业带来发展新机遇
氢能作为一种备受追捧的零污染高效能源,其稀缺性使得人们对其渴求不已。然而,能耗巨大的压缩过程以及极低温度下的液化环节,被视为通往氢能转型之路上的重大障碍。在此背景下,氨成为热门的替代选项,尽管这种物质带有些许气味,但它有望成为能源转型中的奇迹材料。
作者:
-
氨为氢能产业带来发展新机遇
-
氨为氢能产业带来发展新机遇
-
氨为氢能产业带来发展新机遇
-
艾默生自动化技术助力绿氢安全高效生产
-
艾默生自动化技术助力绿氢安全高效生产

